A7 Lite 机械臂
A7 Lite 机械臂文档。
快速开始
from linkerbot import A7lite
with A7lite(
side="left",
interface_name="can0",
) as arm:
arm.enable() # 使能机械臂所有 7 个关节电机
arm.home() # 将机械臂移动到零位
arm.disable() # 失能机械臂所有 7 个关节电机
构造参数
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
side | "left" | "right" | 必填 | 左臂或右臂 |
interface_name | str | 必填 | CAN 接口名,如 "can0" |
interface_type | str | "socketcan" | CAN 接口类型 |
tcp_offset | list[float] | [0.0, 0.0, 0.0] | TCP 偏移量 |
world_frame | "urdf" | "maestro" | "urdf" | 世界坐标系约定 |
构造时会自动检查所有 7 个电机是否在线。
前置依赖: A7 Lite 依赖 Pinocchio 进行运动学计算,需要安装 kinetix 可选依赖:
pip install linkerbot-py[kinetix]
Windows 用户:Pinocchio 不支持 pip 安装,请使用
conda install pinocchio -c conda-forge。
异常:
ImportError: 未安装kinetix可选依赖(Pinocchio)ValueError:side或world_frame参数非法StateError: 电机未响应 CAN 总线 / 上报数据超时
URDF 文件路径:
src/linkerbot/arm/kinetix/urdf/a7_lite__left.urdf和a7_lite__right.urdf
坐标系说明
A7 Lite 支持两种世界坐标系,通过 world_frame 参数选择。
URDF 坐标系(默认)
URDF 模型文件的坐标系,原点位于机器人左右臂肩关节连线中点处,如图所示:
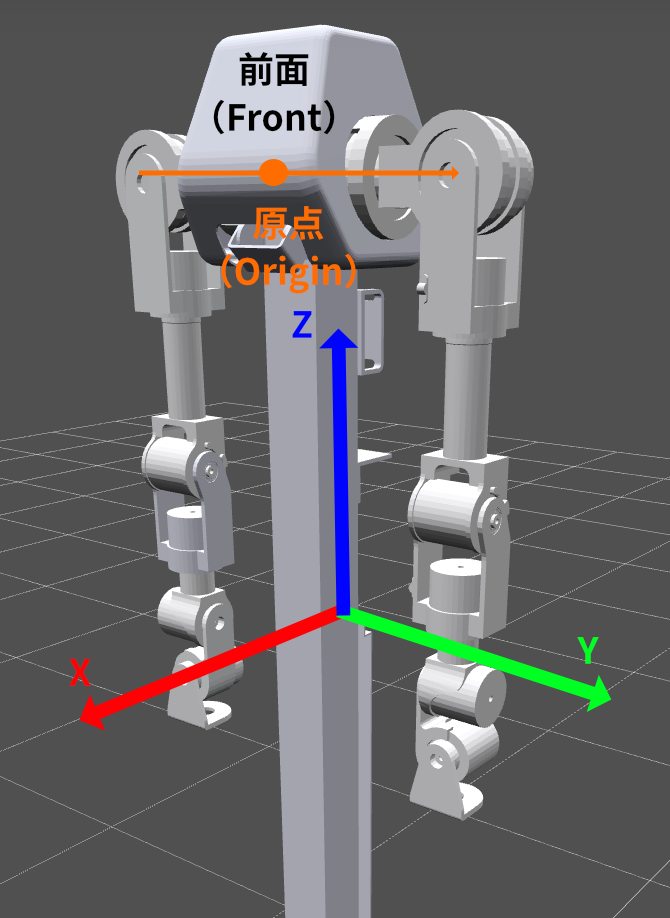
- X 轴:机器人背后指向机器人前方为 X 轴正方向
- Y 轴:机器人视角左手边(面对机器人站立右手边)为 Y 轴正方向
- Z 轴:由右手定则确定上方为 Z 轴正方向
- Rx, Ry, Rz:表示按照 Z,Y,X 轴顺序,逆时针为正进行旋转
Maestro 坐标系
Maestro 坐标系,相对 URDF 坐标系进行了两步变换,如图所示:
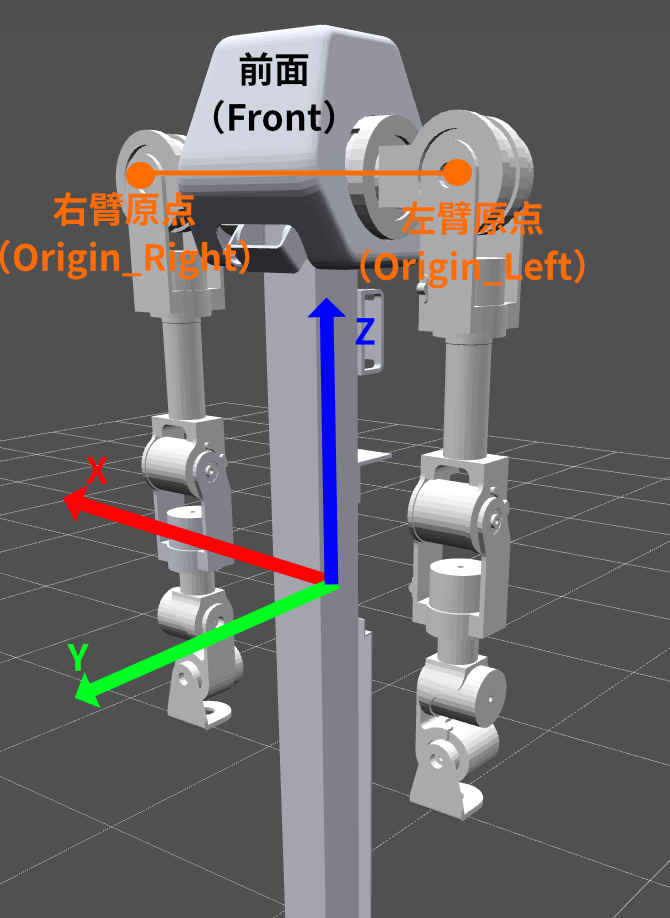
- 原点平移:将世界坐标原点从基座中心平移到 Joint 2(肩部第二关节)中心处
- Z 轴旋转 90°:在新原点将 URDF 坐标轴绕 Z 轴逆时针旋转 +90°
变换后:
- X 轴:机器人视角右手边(面对机器人站立左手边)为 X 轴正方向
- Y 轴:机器人背后指向机器人前方,为 Y 轴正方向
- Z 轴:由右手定则确定上方为 Z 轴正方向
注意:这两种坐标的定义方式主要影响
move_p和move_l涉及到Pose的部分,不影响move_j控制
关节定义
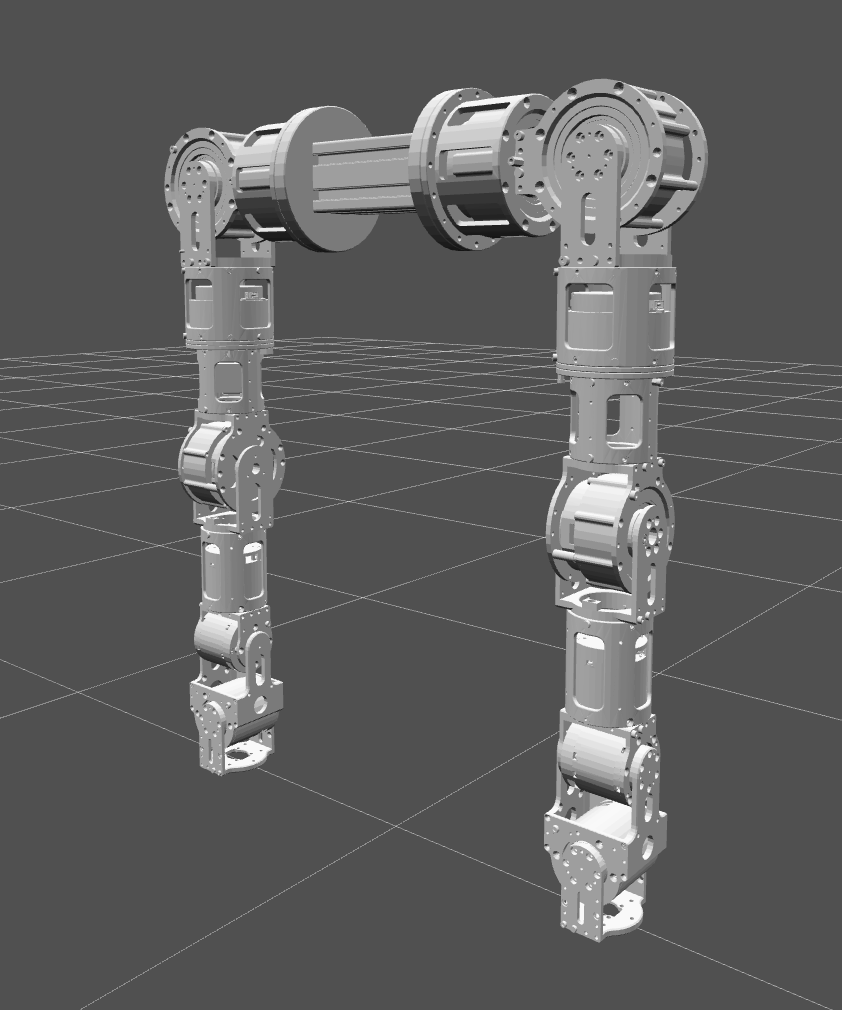
零位定义
所有关节角度为 [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0] 时,机械臂应当处于“自然下垂“姿态(关节相互垂直);调用 home() 可回到零位,如下图所示:
角度正方向定义
角度正方向遵从右手定则:以右手拇指指向旋转轴正方向,四指弯曲方向为正角度增大方向。
由于 URDF 中各关节轴可能为负方向(如 0 -1 0),实际正角度方向与直觉相反:
- 轴为
0 -1 0(Y 轴负方向):发送更大角度时,关节绕 Y 轴负方向旋转,即 Y 轴正方向指向自己时顺时针旋转。 - 轴为
-1 0 0(X 轴负方向):发送更大角度增大时,关节绕 X 轴负方向旋转,即 X 轴正方向指向自己时顺时针旋转。 - 轴为
0 0 1(Z 轴正方向):发送更大角度时,关节绕 Z 轴正方向旋转,即从上方看为逆时针。
A7 Lite 左臂关节一览(URDF 坐标系)
| 索引 | 关节名称 | 物理含义 | 旋转轴(URDF) | 角度范围(rad) |
|---|---|---|---|---|
| 0 | L1_JOINT | 肩部俯仰 | Y 轴负方向(0 -1 0) | [-2.18, 3.75] |
| 1 | L2_JOINT | 肩部横滚 | X 轴负方向(-1 0 0) | [-3.33, 0.19] |
| 2 | L3_JOINT | 肩部偏转(上臂扭转) | Z 轴正方向(0 0 1) | [-2.26, 2.26] |
| 3 | L4_JOINT | 肘部俯仰 | Y 轴负方向(0 -1 0) | [-0.78, 1.74] |
| 4 | L5_JOINT | 肘部偏转(前臂扭转) | Z 轴正方向(0 0 1) | [-2.96, 2.96] |
| 5 | L6_JOINT | 腕部俯仰 | Y 轴负方向(0 -1 0) | [-1.57, 1.57] |
| 6 | L7_JOINT | 腕部横滚 | X 轴负方向(-1 0 0) | [-1.57, 1.57] |
A7 Lite 右臂关节一览(URDF 坐标系)
| 索引 | 关节名称 | 物理含义 | 旋转轴(URDF) | 角度范围(rad) |
|---|---|---|---|---|
| 0 | R1_JOINT | 肩部俯仰 | Y 轴正方向(0 1 0) | [-3.75, 2.18] |
| 1 | R2_JOINT | 肩部横滚 | X 轴负方向(-1 0 0) | [-0.19, 3.33] |
| 2 | R3_JOINT | 肩部偏转(上臂扭转) | Z 轴正方向(0 0 1) | [-2.26, 2.26] |
| 3 | R4_JOINT | 肘部俯仰 | Y 轴正方向(0 1 0) | [-1.74, 0.78] |
| 4 | R5_JOINT | 肘部偏转(前臂扭转) | Z 轴正方向(0 0 1) | [-2.96, 2.96] |
| 5 | R6_JOINT | 腕部俯仰 | Y 轴正方向(0 1 0) | [-1.57, 1.57] |
| 6 | R7_JOINT | 腕部横滚 | X 轴负方向(-1 0 0) | [-1.57, 1.57] |
Pose(TCP 位姿)表示
Pose 表示 TCP(Tool Center Point,工具中心点)位姿,是一个 Pydantic 模型,包含 6 个字段:
from linkerbot import Pose
pose = Pose(x=0.3, y=0.1, z=0.5, rx=0.0, ry=0.5, rz=0.0)
| 字段 | 含义 | 单位 |
|---|---|---|
x, y, z | 空间坐标位置 | 米(m) |
rx | 绕 X 轴旋转(Roll),范围 [-π, π] | 弧度(rad) |
ry | 绕 Y 轴旋转(Pitch),范围 [-π/2, π/2] | 弧度(rad) |
rz | 绕 Z 轴旋转(Yaw),范围 [-π, π] | 弧度(rad) |
- 姿态使用外旋 ZYX 欧拉角表示:先绕世界坐标轴的 Z 轴旋转 rz,再绕世界坐标轴的 Y 轴旋转 ry,最后绕世界坐标轴的 X 轴旋转 rx。
生命周期管理
API 参考
| 方法 | 说明 |
|---|---|
enable() | 使能所有 7 个关节电机,会导致短暂失能。 |
disable() | 失能所有 7 个关节电机。 |
emergency_stop() | 紧急停止机械臂。此方法会阻塞约 2 秒。 |
calibrate_zero() | 将当前位置设为零位。需要机械臂处于失能状态。 |
reset_error() | 重置所有关节的错误状态。 |
close() | 关闭连接:等待运动完成后停止 CAN 调度器。使用 with 语句时会自动调用。 |
注意事项
- 调用
arm.enable()使能时会导致机械臂短暂失能。 - 设置零位需要机械臂处于失能状态。
emergency_stop()是阻塞调用,会等待约 2 秒。
控制模式
当前仅支持 PP(Profile Position)模式,调用 enable() 时会自动设置。
ControlMode 枚举可从 linkerbot 导入:
from linkerbot import ControlMode
CAN 总线
interface_name 指定 CAN 接口名称(如 "can0"),interface_type 指定接口类型(默认 "socketcan")。
更多信息(包括 Windows 用法)请参阅 CAN 总线配置。
功能模块
| 模块 | 文档 |
|---|---|
| 运动控制(move_j/move_p/move_l) | motion.md |
| 运动学(FK/IK/关节限位) | kinematics.md |
| 状态读取(角度/速度/扭矩/温度) | state.md |
| 参数配置(速度/加速度/PID) | config.md |